- 软件



/中文/

/中文/

/中文/

/英文/

/中文/

/中文/

/中文/

/中文/

/中文/
/中文/
软件Tags: Kittenblock机器人编程软件
kittenblock怎么写入硬件?Kittenblock是一款专业的机器人编程软件。机器人编辑软件简单来说就是帮助用户更好的进行机器人的编辑制作,以更简单的方式学习电子以及机器人知识。
Kittenblock是小喵家推出的机器人编程软件,采用模块化积木编程方式编程,支持MicroBit、MiniLFR、Arduino、Dobot、Tello等设备的编程和烧录!
连线引擎简介和使用
小喵家早期的天使用户可能知道在kittenblock 1.4x版本有一个连线引擎的功能,但是因为后面1.5x开始框架大改导致前后不兼容所以删掉了。但是随着现在软件慢慢稳定下来,我们在1.73迭代花了3天将连线引擎完完全全重写了一遍。
连线引擎基本使用介绍
Kittenblock是一个专注于硬件编程的平台,但是硬件编程少不了连线的步骤,Kittenblock内的连线引擎设计的初衷就是多少简化这个步骤,给用户更加直观的电路连接的概念。
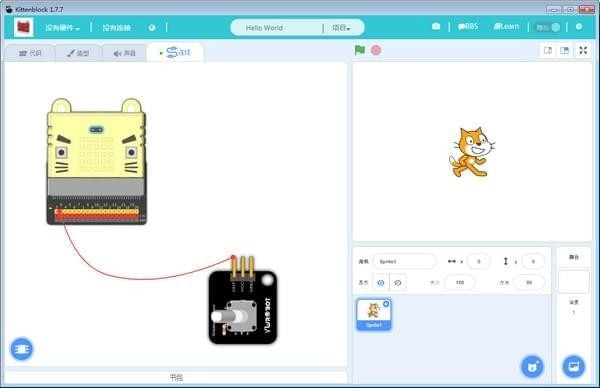
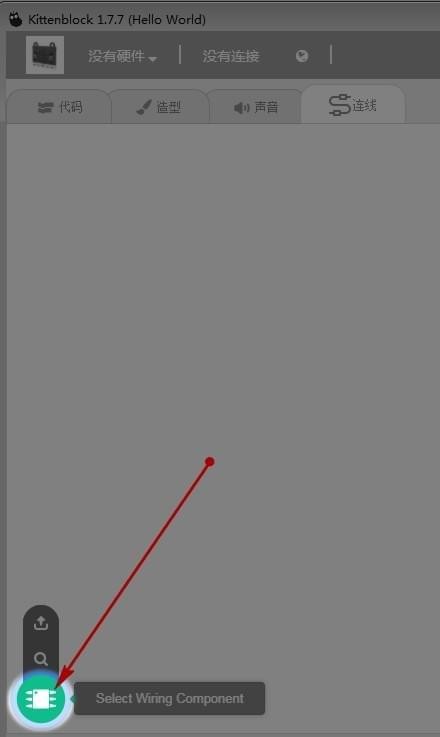
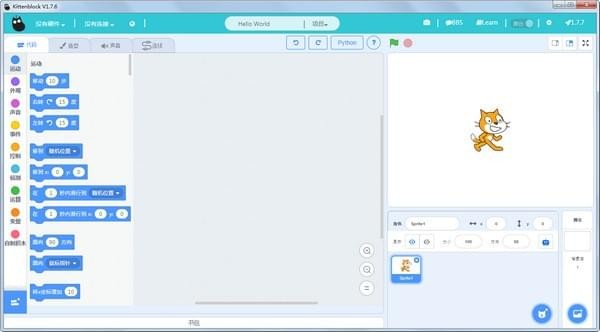
更新了1.73版本的Kittenblock后大家应该可以看到Tab栏多了一个连线的部分:

点击打开后可以看到一张空的画布,在最左下角有一个"+"图标。这个是用于导入电路板或电子模块图片的,目前只支持png格式,导入的图片将以1:1的形式绘制在画布上。在Kittenblock安装目录下的wiring目录有一些我们已经画好的主板和电子模块图片,大家可以自由使用。
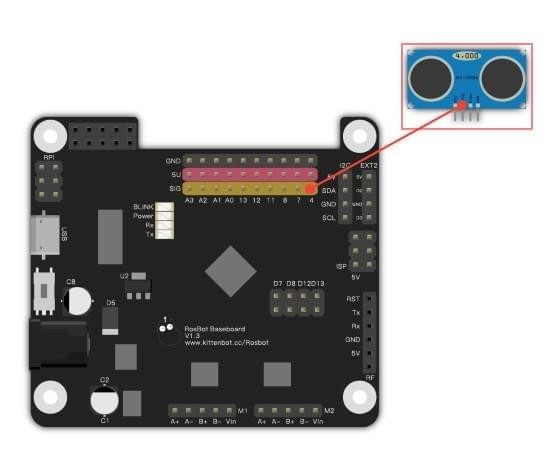
使用上述方法我们导入一个rosbot主板和一个sr04超声波模块:
之后我们来模拟一下连线过程,步骤基本如下:
1、在电子模块针脚处双击鼠标,可以生成一个线路引脚。
2、按着引脚点可以拖动一条导线出来。
3、在另一个引脚释放鼠标可以将两个点用导线连接起来。
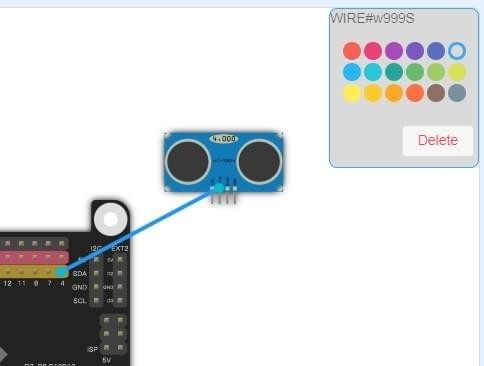
改变颜色
当两个引脚连接上后即使我们拖动电子模块也会自动跟随更新新的位置。目前引脚和导线可以更换颜色,具体操作是先点击导线或者引脚,在右上角弹出来了一个颜色选择框点击对应颜色就可以了~
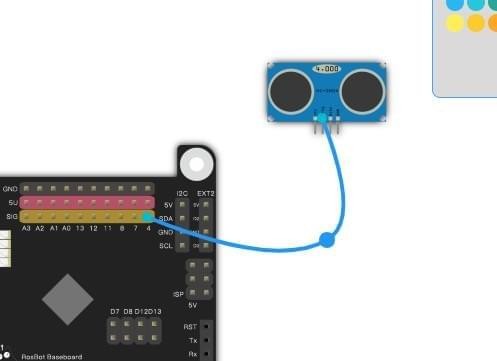
曲线设置
我们也可以给导线添加拐点,将连接从直线变成曲线:
双击某一条导线,大家应该可以看到会新增一个控制点
拖动控制点就可以弯曲导线了
连线结果保存和打开
目前保存项目为sb3的时候自动将连线引擎的内容打包到sb3内,所有电子模块的图片也会自动打包进去。当打开这个sb3的时候,连线内容会自动重新加载进来。
由于电子模块图片是打包在sb3文件内的,即使你把文件给其他小伙伴,他们电脑中没有这个电子模块的图片也能正常打开。
1.V1.77 Kittenblock迭代说明
1.1.连线引擎改进提升
内置喵家体系模块图片
支持外部加载模块图片
支持图片旋转与缩放
标签栏中有连线标签提醒
连线图直接保存在sb3
1.2.集成MIT所做的Microbit
只能使用蓝牙连接
需要烧录MIT为Microbt对应写的固件
1.3.arduino积木块开源,另外已
经开放API让用户接入自己插件
1.4.硬件连接框架更改
1.5.ottoDIY插件翻译
1.6.Kittenbot灯条使用的颗数不限制
1.7.小bug的修改
 Scarab Darkroom(数码暗房)
Scarab Darkroom(数码暗房) Video to Picture(视频转图像)
Video to Picture(视频转图像) Acon Digital Equalize(音乐均衡器)
Acon Digital Equalize(音乐均衡器) Kabuu Audio Converter(音频转换器)
Kabuu Audio Converter(音频转换器) CAD云服务(自动转T3格式)
CAD云服务(自动转T3格式) TLP音乐工具箱
TLP音乐工具箱 脉冲语音合成器
脉冲语音合成器 V-Can(视频拼接软件)
V-Can(视频拼接软件) 爱转换PDF转换器
爱转换PDF转换器 Easy M4V Converter(M4V转换器)
Easy M4V Converter(M4V转换器)












 核桃编程电脑版编程开发 / 272.4M
核桃编程电脑版编程开发 / 272.4M Apifox(接口调试工具)编程开发 / 129.5M
Apifox(接口调试工具)编程开发 / 129.5M scratch编程软件电脑版编程开发 / 161.3M
scratch编程软件电脑版编程开发 / 161.3M ApiPost接口调试与文档生成工具编程开发 / 90.3M
ApiPost接口调试与文档生成工具编程开发 / 90.3M 编程猫公测版编程开发 / 54.6M
编程猫公测版编程开发 / 54.6M tortoisegit中文语言包下载编程开发 / 13.1M
tortoisegit中文语言包下载编程开发 / 13.1M SVN客户端TortoiseSVN编程开发 / 20.2M
SVN客户端TortoiseSVN编程开发 / 20.2M 快手aardio下载编程开发 / 9.3M
快手aardio下载编程开发 / 9.3M VC2015-2022 REDIST编程开发 / 47.3M
VC2015-2022 REDIST编程开发 / 47.3M Microsoft Visual Studio 2022编程开发 / 1.3M
Microsoft Visual Studio 2022编程开发 / 1.3M 7-zip下载v18.03 简体中文美化版压缩解压
7-zip下载v18.03 简体中文美化版压缩解压 数独计算器v1.2 免安装版教育学习
数独计算器v1.2 免安装版教育学习 Boilsoft FLV Converterv1.6 绿色版格式转换
Boilsoft FLV Converterv1.6 绿色版格式转换 微简vipage(代码自动生成器)v4.2 官方版编程开发
微简vipage(代码自动生成器)v4.2 官方版编程开发 磁盘加密软件CnCrypt下载v1.23 官方版加密解密
磁盘加密软件CnCrypt下载v1.23 官方版加密解密 2017异鬼Ⅱ病毒免疫工具腾讯电脑管家查杀v1.0 最新版系统安全
2017异鬼Ⅱ病毒免疫工具腾讯电脑管家查杀v1.0 最新版系统安全 新科图库v1.1 正式版图像管理
新科图库v1.1 正式版图像管理 吾爱倒计时v1.0.1 中文版开关定时
吾爱倒计时v1.0.1 中文版开关定时 局域网共享精灵v10.6 官方绿色版网络共享
局域网共享精灵v10.6 官方绿色版网络共享 粤公网安备 42011102000245号
粤公网安备 42011102000245号